Section 9.2 Rotation Angle as a Vector
(Requires Calculus)
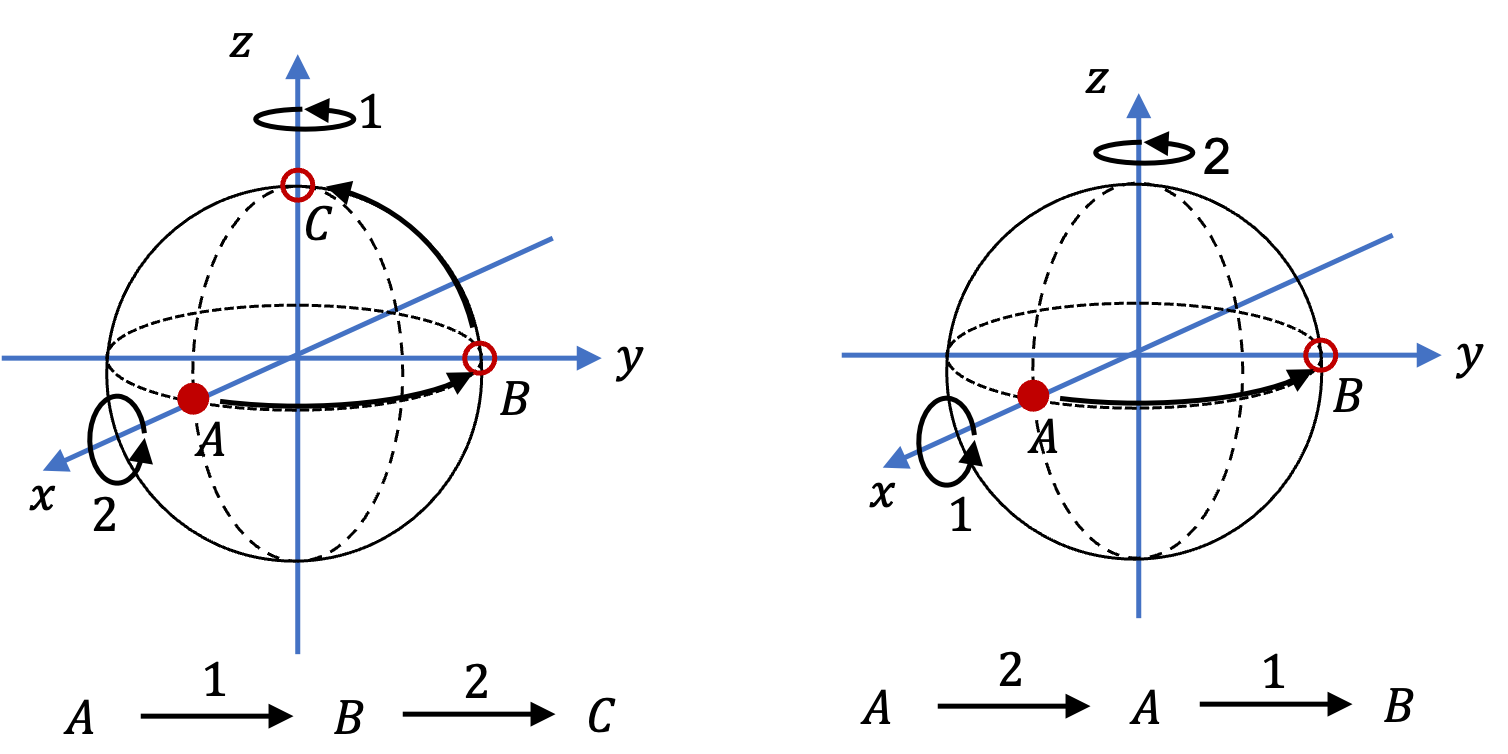
Could we include information about axis in the angle of rotation? Say, you rotate about \(z\)-axis by \(\pi/2\) rad, then, could we write this as a vector \(\frac{\pi}{2}\, \hat k\,\text{?}\) It turns out that we cannot do this. Let’s illustrate this by rotating a point mass as in Figure 9.10 about \(z\) and \(x\) axes. The result of rotation about \(z\)-axis followed by \(x\)-axis is different than rotation about \(x\)-axis followed by \(z\)-axis. If we could write rotation angle as a vector, we will get an absurdity: \(\vec \theta_1 + \vec \theta_2 \) \(\ne\) \(\vec \theta_2 + \vec \theta_1 \text{.}\)
Although, we cannot treat a rotated angle as a vector, the situation is different if angles are infinitesimal as shown in Figure 9.11.
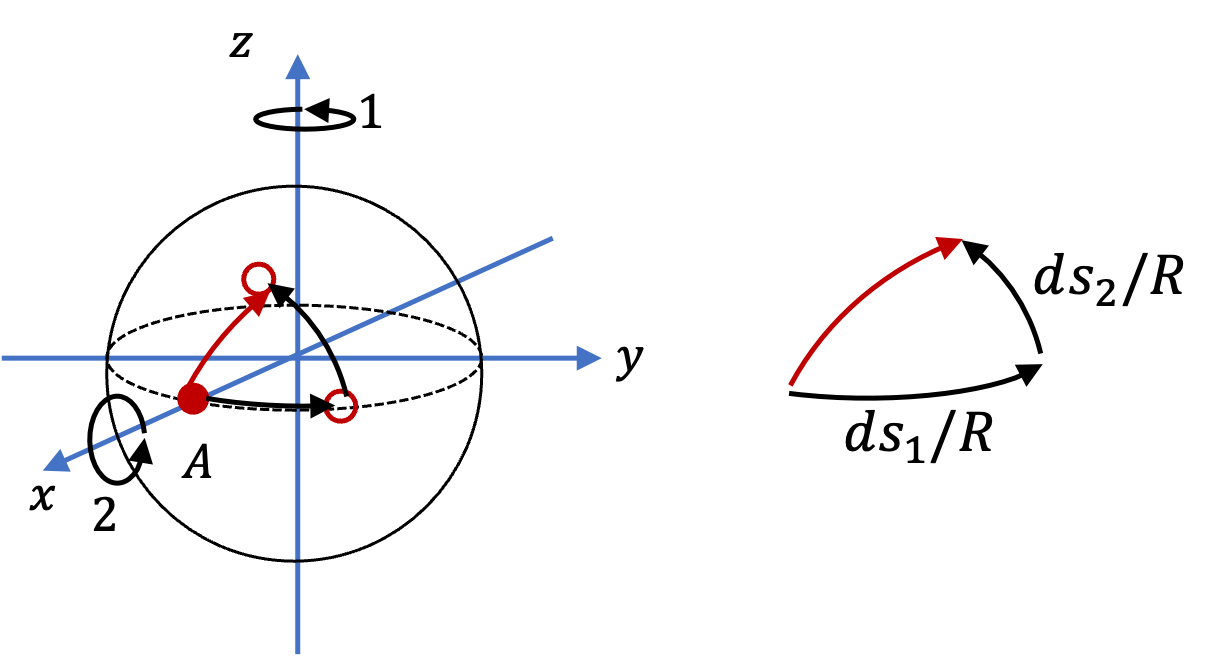
That is, the difference between a rotation about \(d\theta_1\) about \(z\)-axis followed by \(d\theta_2\) about \(x\)-axis and a rotation about \(d\theta_2\) about \(x\)-axis followed by \(d\theta_1\) about \(z\)-axis would be negligible so that we can treat these infinitesimal rotations as vectors with net rotation, \(d\theta_1\,\hat k + d\theta_2\,\hat i.\)
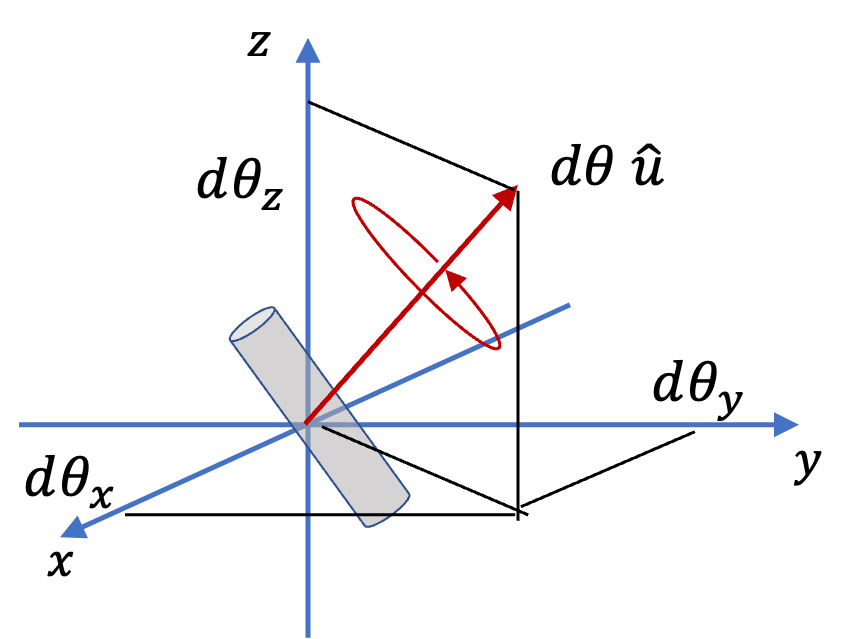
Hence, we can incorporate axis of rotation in analytic description of rotation by using infinitesimal rotation vectors with direction of vector being the axis of rotation and the angle of rotation being \(d\theta\text{.}\) Thus, for an arbitrary axis \(\hat u\) of rotation we will write
\begin{equation}
d\theta\,\hat u = d\theta_x\, \hat i + d\theta_y\, \hat j + d\theta_z\, \hat k.\tag{9.1}
\end{equation}
If we divide infinitesimal angular displacement vector by infinitesimal time we will get rotation velocity vector. We will discuss rotation velocity in next section.
