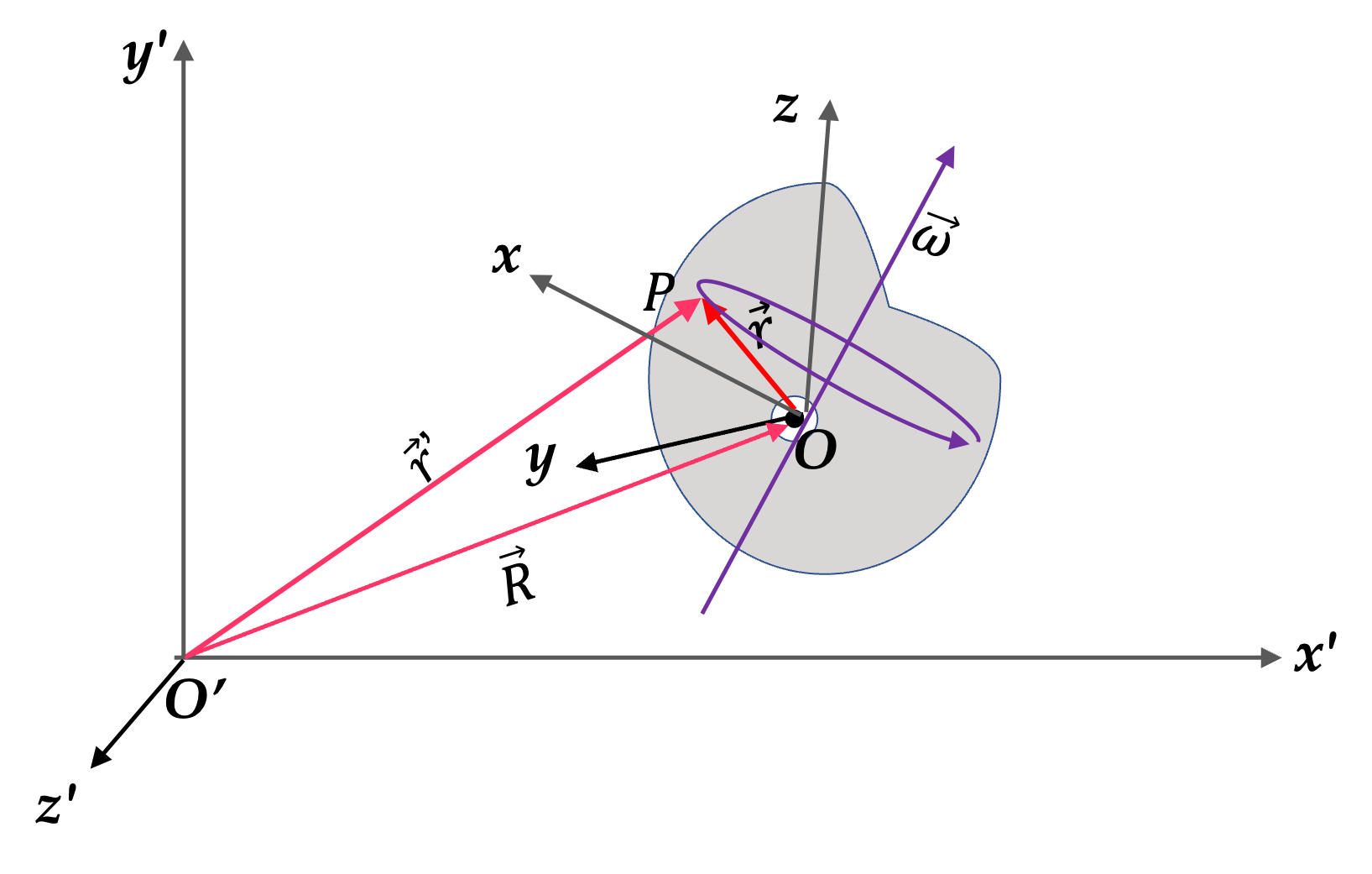
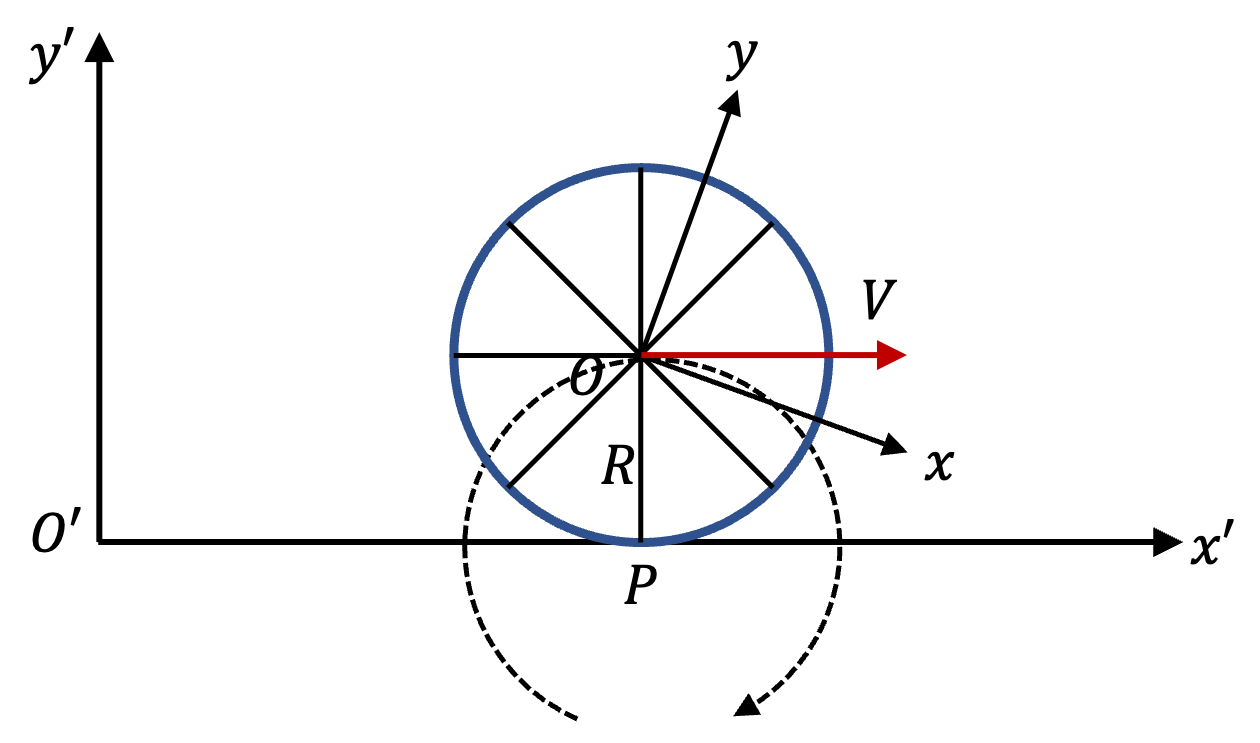
It is important to note that angular velocity
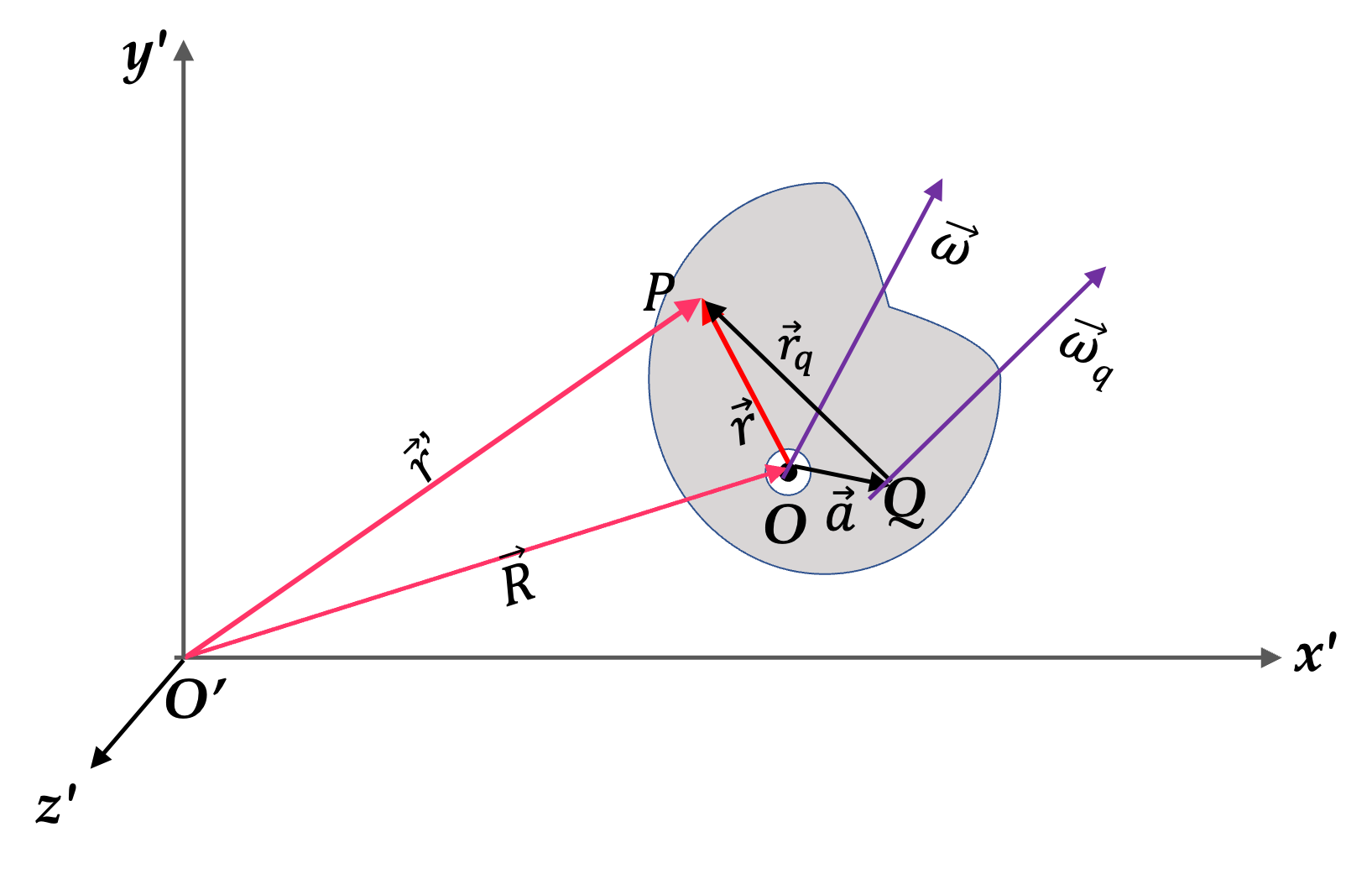
\(\vec \omega\) is independent of the choice of body coordinate system. We can prove that by following the displacement of same point P with respect to the fixed coordinate system
\(O'x'y'z'\) but via either of the two moving coordinate system whose origins are at
\(O\) and
\(Q\) as shown in
Figure 10.4.
Magnitude of displacement vector \(\vec a\) between \(O\) and \(Q\) is fixed in time but its direction may change with change in orientation. Just as \(\vec r\) rotates with angular velocity \(\omega\) about \(O\)m \(\vec a\) does the same with
\begin{equation*}
\frac{d\vec a}{dt} = \vec \omega \times \vec a.
\end{equation*}
We have two sets of relations.
\begin{align}
\amp \vec v' = \vec V + \vec \omega \times \vec r. \tag{10.2}\\
\amp \vec v' = \vec V_q + \vec \omega_q \times \vec r_q. \tag{10.3}
\end{align}
Here \(\vec V_q\) can be related to \(\vec V\) by taking derivative of \(\vec R_q = \vec R + \vec a\text{.}\)
\begin{align}
\amp \vec V_q = \vec V + \vec \omega \times \vec a. \tag{10.4}\\
\amp \vec r_q = \vec r - \vec a. \tag{10.5}
\end{align}
Therefore,
\begin{align*}
\vec v' \amp = \vec V_q + \vec \omega_q \times \vec r_q\\
\amp = (\vec V + \vec \omega \times \vec a ) + \vec \omega_q \times ( \vec r - \vec a)\\
\amp = [\vec V + \vec \omega_q \times \vec r] + (\vec \omega - \vec \omega_q) \times \vec a.
\end{align*}
This must equal
\(\vec v'\) from Eq.
(10.2). That is,
\begin{equation*}
(\vec \omega - \vec \omega_q) \times (\vec r - \vec a) = 0.
\end{equation*}
For this to hold for arbitrary \(\vec r\) and \(\vec a\text{,}\) we must have
\begin{equation}
\vec \omega_q = \vec \omega.\tag{10.6}
\end{equation}
That is, angular velocity with respect to every body-attached axes is same. Normally, it is common to choose O at the center of mass. Although arbitrary, this choice helps simplify calculations considerably.